Abstraksi
Dunia mainan anak-anak adalah dunia yang tidak pernah surut termasuk jika dikaji dari sisi bisnis. Dari mainan yang paling sederhana hingga mainan yang paling canggih, dan menerapkan teknologi tinggi seperti robot yang menyerupai binatang peliharaan selalu mendapatkan segmen pasarnya tersendiri.
Dari segi bahannya dapat bermacam-macam. Bisa plastik, kayu, kain seng atau bahan-bahan bekas yang selama ini menjadi sumber masalah sampah, dapat di olah secara kreatif sehingga menghasilkan suatu bentuk kemasan mainan yang menarik. Ini menjadi sebuah tantangan sekaligus peluang bagi generasi muda kita
Dalam tulisan ini ingin mengulas sedikit tentang teknologi sistem digital untuk mobil-mobilan dengan memanfaatkan komponen komputer bekas. Ada beberapa Komponen atau perangkat komputer yang lambat laun mengalami pergeseran karena ada komponen baru yang lebih mutakhir dan canggih. Seperti halnya disk drive besar yang dulu masih populer digunakan kini tinggal digudang-gudang/bengkel komputer tanpa bisa dimanfaatkan. Solusi terakhir biasanya adalah menyerahkan pada tukang rongsok (pengumpul barang bekas) untuk di daur ulang.
Ada komponen pada disk drive yang coba dimanfaatkan yaitu motor steper. Motor steper yang ada di disk drive dapat kita manfaatkan sebagai penggerak /actuator rancangan mobil-mobilan kali ini. Mobil-mobilang disini lebih menyerupai tingkah laku gerakan binatang yang mengikuti arah atau sumber cahaya. sehingga akan penulis beri namaRobot Mobil Pencari Cahaya.
Gambar 0. Motor steper
Pemodelan Sitem Robot Mobil
Dalam memodelkan atau menggambarkan sistem secara garis besar dapat dikaitkan dengan sistem kendali atau sistem instrumentasi. Walaupun sistem kendali dan sistem instrumentasi dibahas secara terpisah, namun keduanya saling mendukung dalam menjelaskan atau mengantarkan suatu perancangan sistem elektronika. Suatu diagram blok sistem instrumenasi dapat dilihat pada Gambar 3.1. Sedangkan pengimplementasian sistem instrumentasi pada Gambar kesistem robot yang akan dibuat dapat dilihat pada Gambar….
Gambar 1 Variasi gerakan Robot Mobil Pencari Cahaya
Dibutuhkan dua motor stepper untuk menggerakkan robot mobil ini. Dan untuk menggerakkan satu motor stepper membutuhkan satu sistem yang teridiri dari sensor, pembagi tegangan, counter, clock, dekoder dan penguat. Dapat dilihat blok-blok dalam Gambar 3.2 ada beberapa blok perlu perancangan lebih detail dengan memperhatikan sinyal masukan dan sinyal keluaran yang diperlukan.
Keterangan Tx1 = Transduser awal (sensor)
SC1 = Pengkondisi sinyal awal
SP = Pemroses sinyal
SC2 = pengkondisi sinyal akhir
Tx2 = Transdiser akhir (aktuator)
Gambar 2. Diagram blok sistem instrumentasi elektronis
Gambar 3. Diagram blok implementasi untuk robot mobil
1. Rancangan rangkaian logika kombinasional
Dalam memulai rancangan secara keseluruhan perlu didahulukan blok atau komponen yang penting. Sehingga jika dalam perjalanan perancangan terdapat perubahan diharapkan tidak merubah sistem secara keseluruhan.
Rancangan logika kombinasional berkaitan dengan dekocer. Dekoder mendapat masukan dari counter dan mengeluarkan sinyal yang dibutuhkan untuk menggerakkan motor stepper. Fungsi dekoder ini untuk mengubah kode biner satu ke kode yang lain. Untuk merancang dekoder ini diperlukan beberapa langkah yang akan dijelaskan lebih lanjut.
Menentukan sinyal masukan dan keluaran. Dengan menentukan posisi keluaran untuk masing-masing kombinasi masukan, hasilnya dapat dilihat dalam Tabel Sinyal masukan dekoder merupakan keluaran dari IC counter sedangkan sinyal keluaran dekoder merupakan sinyal yang dibutuhkan untuk menggerakkan motor stepper.
Melihat bentuk tiap keluaran dekoder. Maka dapat terbentuk tabel kebenaran seperti Tabel untuk keluaran B. Dari tabel kebenaran tersebut dapat ditentukan gerbang atau kombinasi gerbang yang dapat menghasilkan sini.
Tabel 1. Posisi keluaran terhadap masukan dekoder
Masukan
|
Keluaran
|
B’
|
A’
|
D
|
C
|
B
|
A
|
0
|
0
|
1
|
0
|
0
|
1
|
0
|
1
|
0
|
0
|
1
|
1
|
1
|
0
|
0
|
1
|
1
|
0
|
1
|
1
|
1
|
1
|
0
|
0
|
Tabel Salah satu keluaran dekoder
Masukan
|
keluaran
|
B’
|
A’
|
B
|
0
|
0
|
0
|
0
|
1
|
1
|
1
|
0
|
1
|
1
|
1
|
0
|
Gambar 4. Gerbang EXOR
Menetukan gerbang yang dapat diterapkan dalam sistem. Dengan melihat ciri Tabel dapat ditentukan bahwa gerbang yang dapat digunakan adalah gerbang EXOR Bisa dilihat sinyal keluaran D adalah kebalikan dari sinyal keluaran B, maka tinggal menambah gerbang NOT pada keluaran gerbang EXOR. Masih menerapkan gerbang EXOR, masukan sinyal A’B akan menghasilkan sinyal keluaran C, dimana A’ adalah sinyal keluaran counter dan B adalah keluaran dekoder yang diumpan balikkan menjadi masukan gerbang EXOR. Dan juga bisa dilihat bahwa sinyal keluaran A adalah kebalikan sinyal keluaran C. Maka dapat diterapkan rancangan gerbang logika yang sama dengan gerbang yang mengeluarkan sinyal C hanya dengan menambah gerbang NOT pada keluarannya. Dari keterangan tiap-tiap sinyal keluaran juga dapat dijelaskan dengan ekspresi logika yaitu A = A’+ B , B = A’+B’ , C= A’+ B, D = A’+ B’
Membuat untai digital berdasarkan tabel maupun ekspresi logika diatas. Berdasarkan tabel dan ekspresi logika atau untai logika yang terbentuk seperti yang ditunjukkan Gambar
Mendapatkan perwujutan rangkaian elektronik menggunakan IC yang siap pakai.Dalam penerapan rangkaian ini rangkaian gerbang EXOR IC 7486, dan gerbang NOT IC 7404. Jika dilihat dari Gambar
Gambar 5. Rangkaian kombinasional sebagai dekoder
2. Rancangan rangkaian sekuensial
Dalam rancangan rangkaian digital sekuensial kali ini berkaitan dengan counter. Tidak diterapkan prosedur secara formal dalam proses perancangannya. Dengan spesifikasi rancangan yang sederhana yaitu perancangan 2-bit, baik cacahan maju, mundur atau cacahan berhenti sebagai masukan dekoder, dapat dilihat modul-modul IC siap pakai yang tersedia dipasaran.
Dengan menggunakan buku data komponen elektronika dipilih IC yang sesuai dengan rancangan adalah IC 74191. Dari empat keluaran IC yaitu QA, QB, QC danQD. dalam IC tersebut hanya akan diambil dua keluaran sebagai masukan dekoder yaitu kaki keluaran QA dan QB. Ini berarti counter hanya akan menghitung 0 sampai 3 (modulo-4).
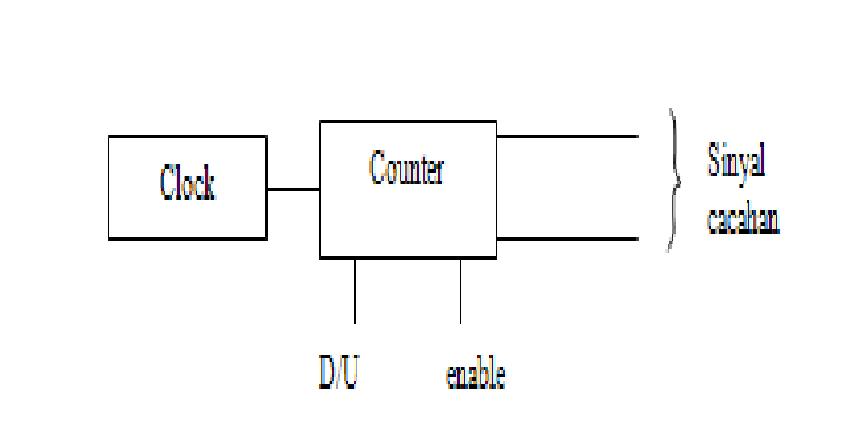
IC 74191 mempunyai masukan D/U yang menentukan maju mundurnya cacahan, kaki masukan enable yang menentukan berhenti atau berjalannya cacahan. Masukan D/U dan enable ini mendapat sinyal umpan balik dari sensor cahaya yaitu berupa taraf tinggi atau rendah (on-off). Gambar representasi counter sebagai kontroler atau pemroses sinyal
Gambar 6 Counter sebagai pemroses sinyal
Gambar 7. Hubungan IC counter dengan dekoder
3. Rancangan rangkaian pembagi tegangan
Pembagi tegangan sebagai pengkondisi sinyal masukan dari sensor. LDR sebagai sensor cahaya mempunyai karakteristik perubahan nilai hambatan terhadap perubahan intensitas cahaya yang mengenainya.
Gambar 8 Rangkaian pembagi tegangan
Rangkaian di buat sedemikian rupa sehingga menghasilkan keluaran 5 V (level tinggi) dan 0V (untuk level rendah) dengan Vcc yang akan diterapkan sekitar 9 volt.
4. Penempatan sensor.
Untuk mendeteksi posisi sumber cahaya yang akan dicari, perlu penempatan sensor secara tepat. Pada Gambar 9 merupakan metode penjajakan cahaya sensor robot terhadap berbagai kemungkinan posisi cahaya.
Gambar 9 Metode Penjajakan Cahaya
Keterangan:
1,2,3,4,5= posisi sumber cahaya
Gambar 10. Posisi LDR
Untuk mengarahkan sumber cahaya dan untuk mengurangi pengaruh cahaya lingkungan, LDR dilengkapi dengan armatur. Contoh bentuk armatur sensor terlihat pada Gambar 11.
Gambar 11. Armatur Sensor
Tabel 2. Tanggapan robot terhadap posisi cahaya
Posisi
Cahaya
|
Gerakan Motor
|
Sinyal Level Tinggi
Dari
|
Bentuk Gerakan
|
kiri
|
kanan
|
1
|
maju
|
diam
|
LDR1
|
Belok kanan
|
2
|
maju
|
maju
|
-
|
Maju
|
3
|
diam
|
maju
|
LDR2
|
Belok kiri
|
4
|
mundur
|
maju
|
LDR3
|
Belok kiri
|
5
|
maju
|
mundur
|
LDR4
|
Belok kanan
|
5. Pembuatan Alat.
a. Pembuatan PCB
Sebelum membentuk rangkaian permanen, perlu langkah uji coba dan modifikasi rancangan. Dalam langkah ini project board dan software komputer EWB dapat membantu.
Rancangan yang telah dejelaskan sebelumnya merupakan hasil yang telah diuji coba dan mofikasi. Sehingga secara meyakinkan dapat direalisasikan kedalam bentuk rankaian yang lebih permanen.
b. Pembuatan mekanik
Mekanik yang dimaksud adalah sebagai tempat motor penggerak dan hubungan dengan roda, tempat rangkaian elektronika dan tempat sumber energi.
Gambar. 12 Bentuk Mekanik Robot
PERCOBAAN ANALISIS
Setelah semua bagian telah diuji coba dari sensor-sensor sampai dengan percobaan PCB yang telah dibuat, maka sampai pada tahap percobaan alat secara keseluruhan, dimana rangkaian batery, motor dan roda-roda telah terpasang pada mekanik robot. Dalam percobaan alat secara keseluruhan perlu penyetelan variabel resistor pada pembagi tegangan, hal ini dilakukan untuk menyesuaikan dengan kondisi cahaya lingkungan sehingga diperoleh putaran motor normal sebagaimana yang diinginkan. Kemudian menjalankan robot tersebut untuk dilakukan percobaan antara lain yaitu:
1. Percobaan dengan Posisi Sumber Cahaya
a. Percobaan 1 menguji bentuk gerakan robot, dengan menempatkan sumber cahaya 90°. Hasil percobaan dapat dilihat pada Tabel 3.
Table 3. Uji coba gerakan robot
No.
|
Posisi sumber Cahaya
|
Bentuk Gerakan
|
1.
|
Kanan robot (90°)
|
Belok kanan ± 75°
|
2.
|
Kiri robot (90°)
|
Belok kiri ± 75°
|
Gambar 13. Bentuk gerakan robot
(a) Belok kiri
(b) Belok kanan
2. Percobaan dengan Pengaruh keadaan Ruangan
Percobaan selanjutnya diamati bentuk gerakan, kecepatan tanggapan robot terhadap cahaya yang mengenainya pada kondisi lingkungan tertentu, hasilnya tercantum dalam Tabel . percobaan yang dilakukan antara lain:
a. Dilakukan pada siang hari di ruangan dengan penerangan.
b. Dilakukan pada siang hari di ruangan tanpa penerangan.
c. Dilakukan pada malam hari di ruangan dengan penerangan
d. Dilakukan pada malam hari di ruangan tanpa penerangan
Tabel 4. hasil percobaan pada siang hari di ruangan dengan penerangan.
No.
|
Bentuk Gerakan
|
Posisi sumber Cahaya
|
Jarak Robot dengan Sumber
|
Waktu (T)
|
1.
|
Lurus
|
Di depan
|
1m
|
58 detik
|
2.
|
Belok kanan
|
Sebelah kanan
|
1m
|
60 detik
|
3.
|
Belok kiri
|
Sebelah kiri
|
1m
|
65 detik
|
(T) = waktu yang ditempuh robot untuk mencapai sumber cahaya
Tabel 5. Hasil percobaan pada siang hari diruangan tanpa penerangan
No.
|
Bentuk gerakan
|
Posisi sumber cahaya
|
Jarak robot dengan sumber cahaya
|
Waktu (T)
|
1.
|
Lurus
|
Di depan
|
1m
|
60 detik
|
2.
|
Belok kanan
|
Sebelah kanan
|
1m
|
67 detik
|
3.
|
Belok kiri
|
Sebelah kiri
|
1m
|
64 detik
|
Tabel 6. Hasil percobaan pada malam hari di ruangan dengan penerangan
No.
|
Bentuk gerakan
|
Posisi sumber cahaya
|
Jarak robot dengan sumber cahaya
|
Waktu (T)
|
1.
|
Lurus
|
Di depan
|
1m
|
60 detik
|
2.
|
Belok kanan
|
Sebelah kanan
|
1m
|
67 detik
|
3.
|
Belok kiri
|
Sebelah kiri
|
1m
|
70 detik
|
Tabel 7. Hasil percobaan pada malam hari di ruangan tanpa penerangan
No.
|
Bentuk gerakan
|
Posisi sumber cahaya
|
Jarak robot dengan sumber cahaya
|
Waktu (T)
|
1.
|
Lurus
|
Di depan
|
1m
|
60 detik
|
2.
|
Belok kanan
|
Sebelah kanan
|
1m
|
67 detik
|
3.
|
Belok kiri
|
Sebelah kiri
|
1m
|
70 detik
|
KESIMPULAN
Setelah melakukan perancangan ini alat secara keseluruhan ada beberapa hal yang bisa disimpulkan:
1. Robot yang telah dibuat dapat melakukan variasi gerakan belok kanan, belok kiri lurus mengikuti sumber cahaya yang mengenainya.
2. Rancangan yang diterapkan dalam robot adalah sistem Digital, sehingga secara teknologi tidak serumit jika menerapkan sistem mikroposesor, secara ekonomi diharapkan akan lebih terjangkau.
3. Alat ini sangat peka dengan kondisi pencahayaan, sehingga tidak bisa di terapkan di ruangan terbuka dengan kondisi cahaya yang sangat terang.
SARAN
Alat ini masih berupa model untuk system elektroniknya. Masih diperlukan langkah-langkah untuk pengembangan termasuk menambah daya tarik dengan modifikasi casing atau tempat.
sumber : http://elkalanjut.blogspot.com/2010/11/v-behaviorurldefaultvmlo_03.html















{kind=link}